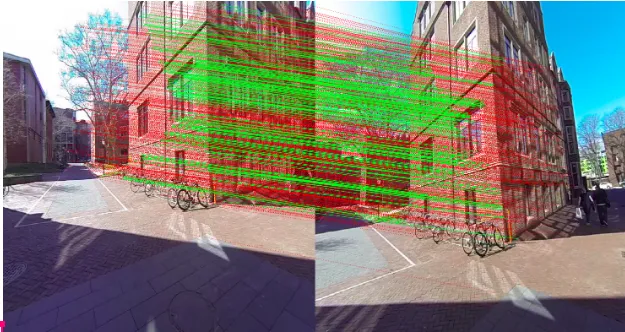
Structure from Motion (SFM, 3D reconstruction)
This project focuses on estimating a three dimensional structure from two-dimensional image sequences which are related to each other by change in camera motion (Orientation and translation). This problem is usually referred to as Structure from motion. There are several algorithms which achieve this.
In this project, we aim to learn how to recreate 3D structures from a given dataset of 2D images using traditional approaches to Sfm.
Learn more

Traffic Sign Classification
Detected traffic signs from a video using MSER, Histogram of Gradients (HOG) features and trained a linear-Support Vector Machine (SVM) for classification purposes. Created bounding boxes around the detected sign and pasted the appropriate sign next to it for verification.
Learn more
Vehicle detection for autonomous driving
Implemented a CNN for a car detection pipeline using YOLO (You Only
Look Once) algorithm in TensorFlow and Keras.Used Non-maximum
suppression and other techniques for improving the accuracy of detection
Learn more
Advance Lane Line Detection
Created a traffic lane segmentation pipeline using HSL & LAB color
spaces by identifying peak histograms.
Used sliding window poly-fitting to determine radius of curvature of the road and distance between center of image and lane to calculate vehicle offset.
Learn more
Lucas Kanade Tracker
Implemented an affineLKTracker to computer affine transformations from
the template to every frame in the sequence and draw the bounding boxes of the rectangles warped from the first frame.
Also made the tracker robust to illumination changes.
Learn more
Visual Odometry
Built an image processing pipeline to plot the route of a car taken from a dash-cam monocular camera.
Calculated fundamental and essential matrices using RANSAC based 8-point algorithm and Zhang’s estimation
Learn more
AR Homography
Developed an image processing pipeline to identify AR tags from a video through contour detection.
Calculated homography and projection matrices to replace the detected AR tag with any given image or a virtual cube
Learn more
Buoy Detection and Color Segmentation
Implemented an underwater buoy detection pipeline that generates a color-segmented binary image,
given the computed model parameters and also draws tight bounding contours around the buoy.
Used Gaussian Mixture Models and Expectation Maximization techniques for color segmentation.
Learn more

SLAM
In this project, the task is to implement a Graph SLAM based approach to create a 2D occupancy grid and 3D octomap of a
given kitchen and dining environment and also a custom gazebo environment. The task is accomplished by a two-wheeled robot with an RGB-D camera and hokuyo LIDAR sensor.
Real-Time Appearance-based mapping approach is implemented using rtab\_ros package. The final 3D octomaps for both the environments are generated by
performing teleoperation via keyboard and real-time applications of such maps are discussed. A custom ROS package is written to complete the above-defined task.
Learn more